3E8 Robotics
My friend Ari Wasch asked me if I wanted to help him out with his robotics startup. My main contributions to the project were developing the architecture of the robot and carrying out the Mechanical design and fabrication.
Architecture
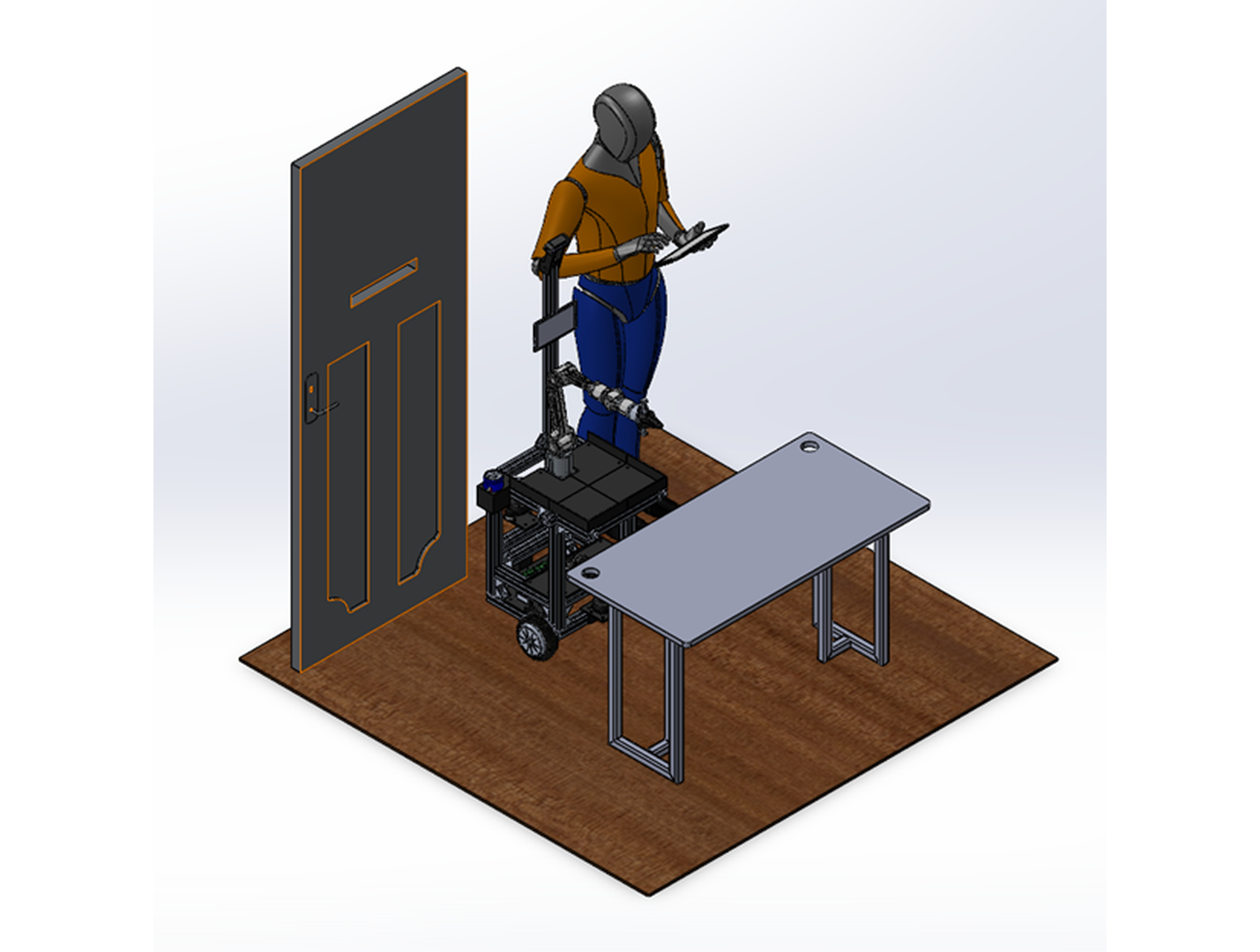
The platform was designed as a low-cost, versatile robot for basic manipulation and transport tasks, aiming to quickly enter the market and address applications targeted by emerging humanoid companies.

We reused parts from previous projects and hackathons. The architecture includes:
- 36V scooter battery
- Jetson Orin Nano
- O-Drive BLDC motor controller
- Hoverboard BLDC motors
- Two Intel Realsense cameras
- Two Rpi LiDARs
- 12V & 24V buck converters
- PiPER robotic arm
These components met the minimum requirements for an autonomous mobile robot with manipulation. We chose an off-the-shelf arm to save development time.
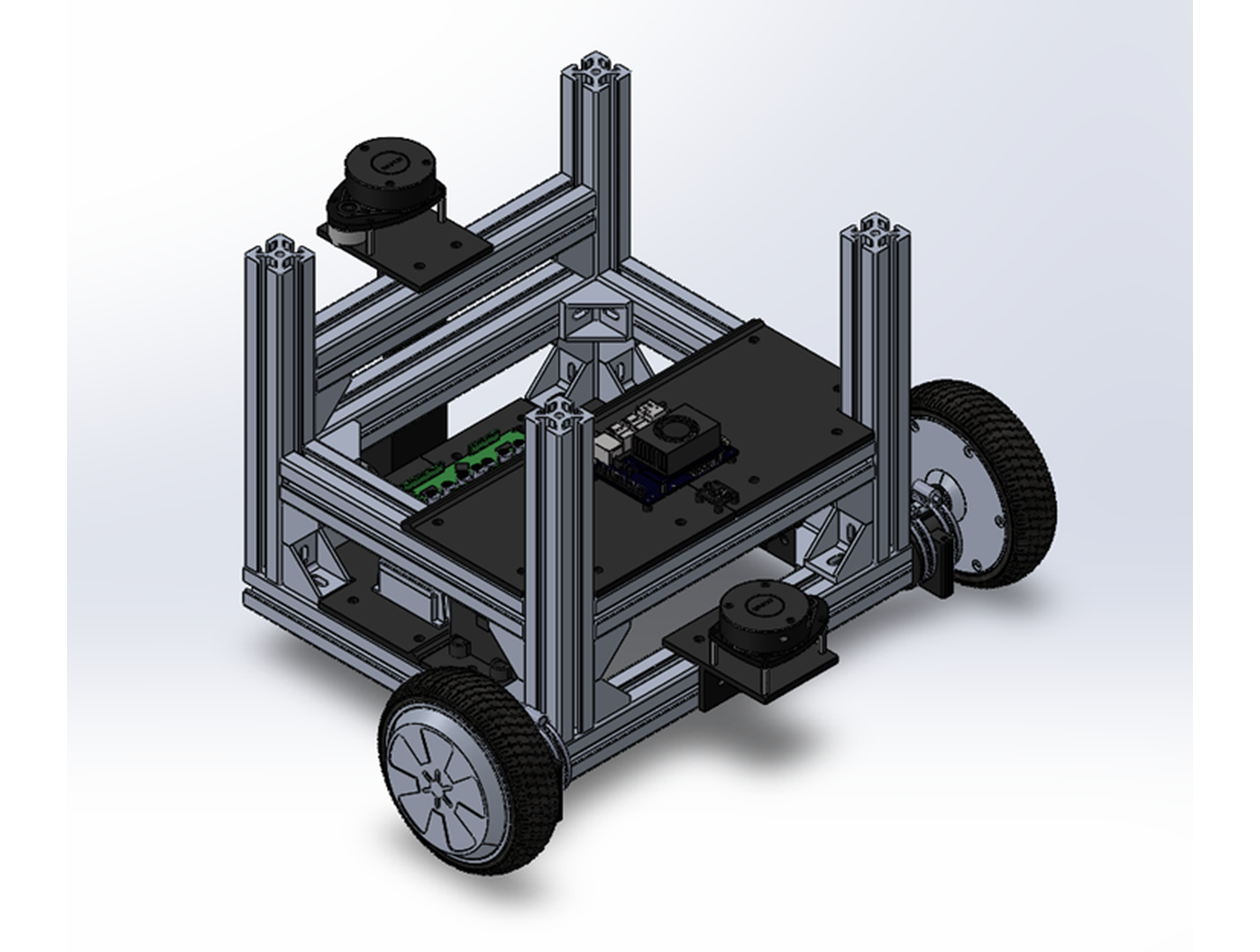
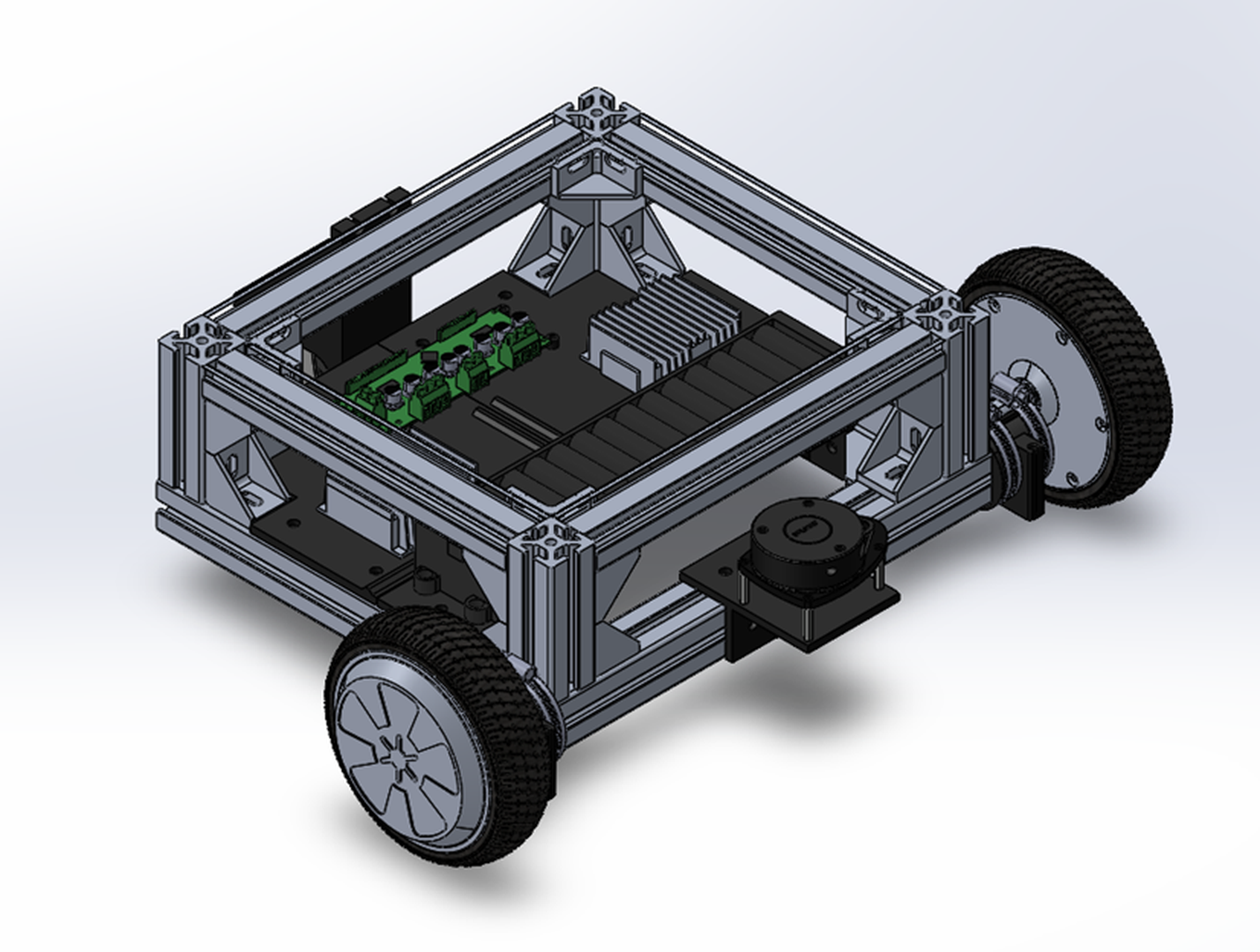
CAD
The frame uses 4040 aluminum extrusions, with electronics mounted via 3D printed parts.

Software
I added tele-operation using an X-Box controller.
Arm Integration
The arm was received and integrated into the platform.
Update
The team is moving to SF to work at Founders Inc.. I’ve left the project, as I’m not able to commit to a hardware startup right now. Best of luck to them.